發布時間:2025-12-16
近日,中國科學院腦科學與智能技術卓越創新中心趙鄭拓、李雪研究團隊,聯合復旦大學附屬華山醫院及相關企業,成功完成第二例侵入式腦機接口臨床試驗。研究團隊采用高通量無線侵入式腦機接口系統(WRS01),使一位高位截癱患者能夠通過腦電信號穩定操控智能輪椅與機器狗,在真實生活場景中實現自主移動與物品取用。
該患者于2022年因脊髓損傷導致高位截癱,2025年6月植入由腦智卓越中心與合作企業共同研發的腦機接口系統。經數周訓練,患者已可穩定控制電腦光標與平板電腦。團隊進一步將系統拓展至三維物理設備控制,實現對智能輪椅與機器狗的連續、穩定、低延遲操控,幫助患者在復雜日常場景中完成多項功能活動。
本研究在關鍵技術層面實現系列突破。在神經信息提取環節,團隊開發出高壓縮比、高保真的神經數據壓縮技術,并創新性地融合了“尖峰頻段功率”,“相鄰脈沖間隔”與“尖峰脈沖計數”幾種數據壓縮方式。該混合解碼模型在噪聲環境下仍能高效提取有效信號,將腦控性能整體提升15%–20%。
面對真實環境中聲、光、電磁干擾及患者生理、心理狀態波動導致的信號不穩定問題,團隊引入“神經流形對齊技術”,從高維動態神經信號中提取穩定低維特征,增強了解碼器的環境適應性與跨天穩定性。
此外,團隊革新系統校準方式,研發“在線重校準技術”。該系統可在患者日常使用中實時微調解碼參數,無需中斷操作進行專項校準,使系統性能持續保持高位,實現“越用越順暢”的用戶體驗。
響應速度是腦機接口的核心指標之一。人體自然神經環路傳導延遲約為200毫秒,本研究通過自定義通信協議,將系統從信號采集到指令執行的端到端延遲壓縮至100毫秒以內,低于生理延遲水平,使患者的控制體驗更為流暢自然。
研究還發現,隨著患者對腦控外設的熟練掌握,任務相關神經活動逐漸由廣泛神經元參與轉向少數高效神經元主導,在降低認知負擔的同時,實現對外設的“內化”操控,從神經機制層面解釋了“隨心所動”的成形過程。
在應用拓展與社會融合方面,團隊積極響應“科技助殘”需求,與地方殘聯合作,引導患者參與線上數據標注等工作,使其通過勞動獲得報酬,從受助者轉變為社會價值的創造者。
基于本次試驗積累的數據與經驗,研究團隊于12月推出性能進一步提升的系統升級版本(WRS02),通道數增至256。WRS02的首例前瞻性臨床試驗計劃于近期開展。
在技術產業化過程中,團隊采取系統化推進策略,以神經界面電極為基礎,逐步構建系統集成、算法優化與應用場景拓展的完整技術體系。隨著臨床數據的持續積累,高質量神經?行為數據將不斷驅動解碼算法升級與新場景開發,形成“數據?創新”雙向增強的良性循環。

腦智卓越中心微納電子加工平臺加工侵入式腦機接口柔性電極

高位截癱患者(左)通過腦智卓越中心等單位研發的腦機接口系統意念控制輪椅
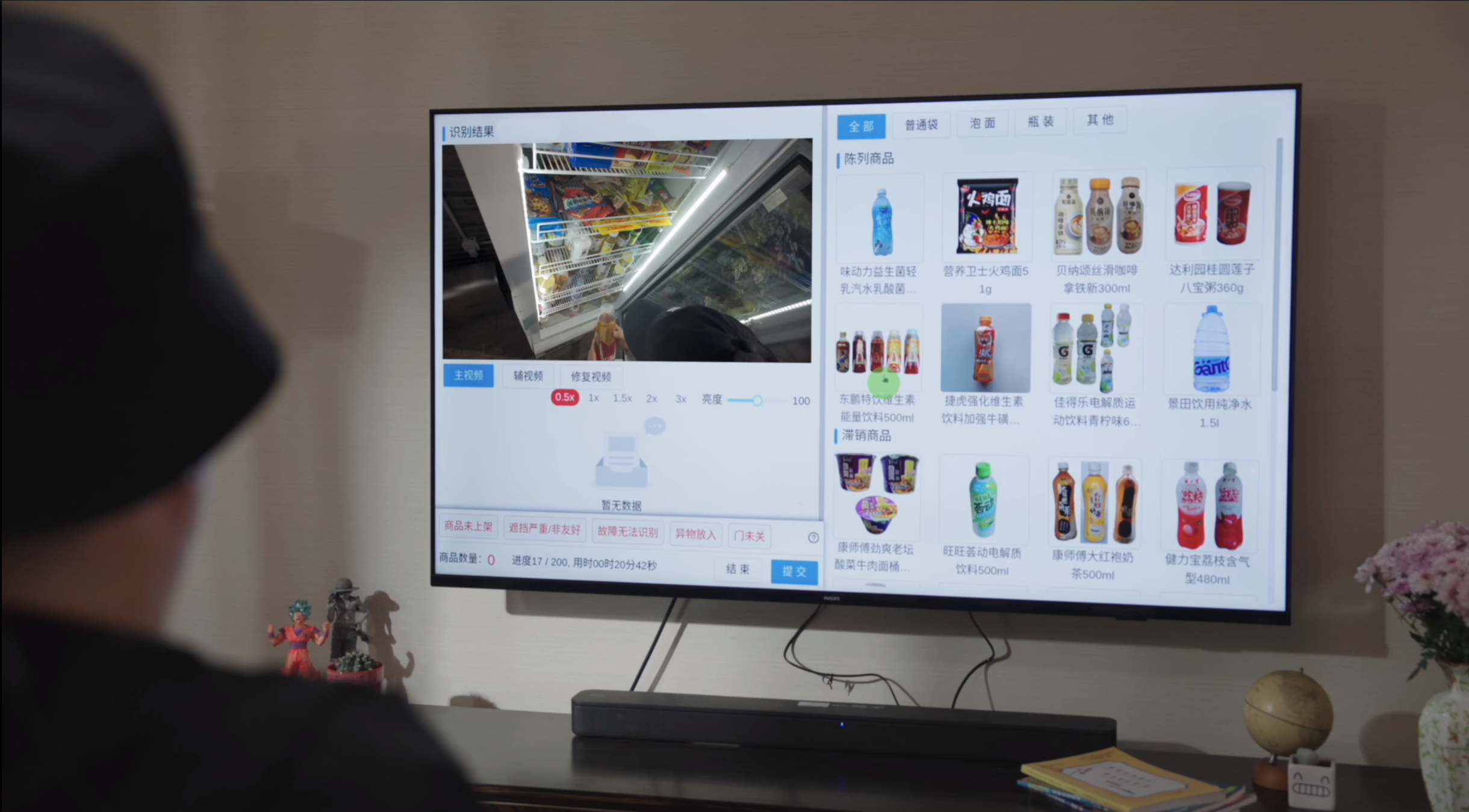
高位截癱患者通過腦智卓越中心等單位研發的侵入式腦機接口系統參與線上數據標注工作

高位截癱患者通過腦智卓越中心等單位研發的侵入式腦機接口系統意念控制機器狗

第二例臨床試驗參與者在腦控輪椅過程中與趙鄭拓交流控制體驗
中國科學院腦科學與智能技術卓越創新中心李雪(左) 趙鄭拓(中) 馬天宇(右)
 附件下載:
附件下載: 